myCobot 280 20.04系统使用说明
HDMI接口选择
建议选择下图所选的接口,分辨率为1920X1080.

python
直接通过文件使用python
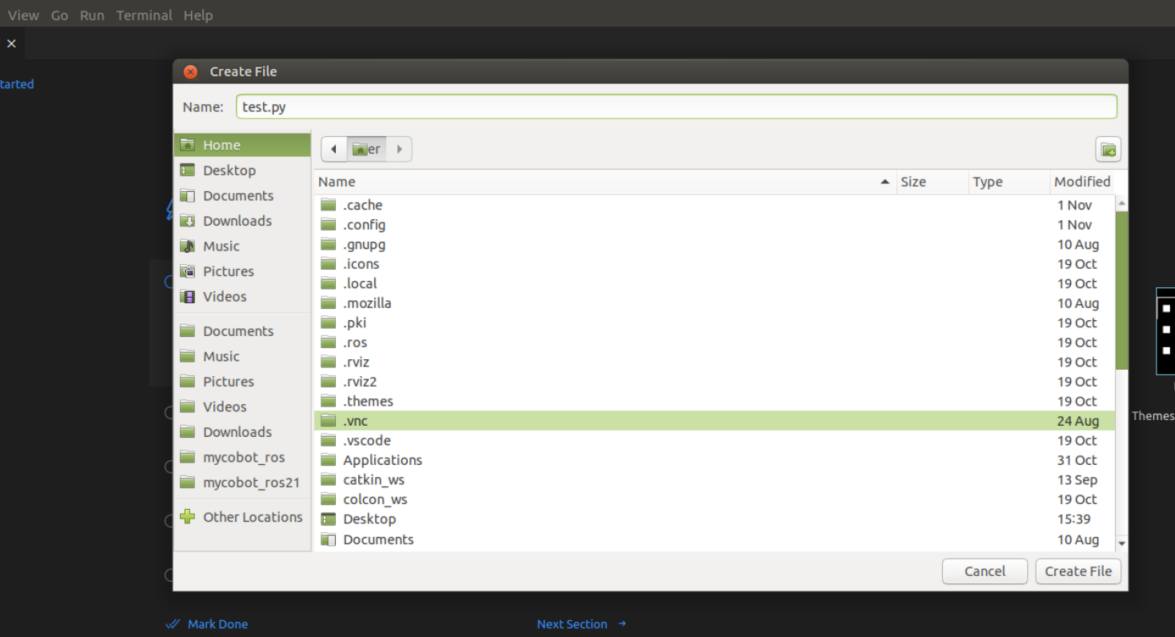
1.直接在桌面右击鼠标,选择Create Document -> Empty File
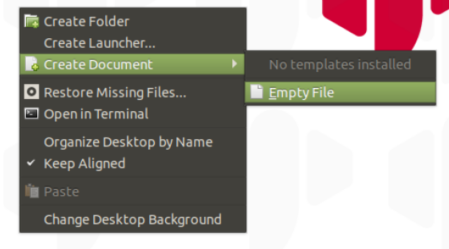
2.对新创建的文件命名及添加后缀名,.py为python文件的后缀名

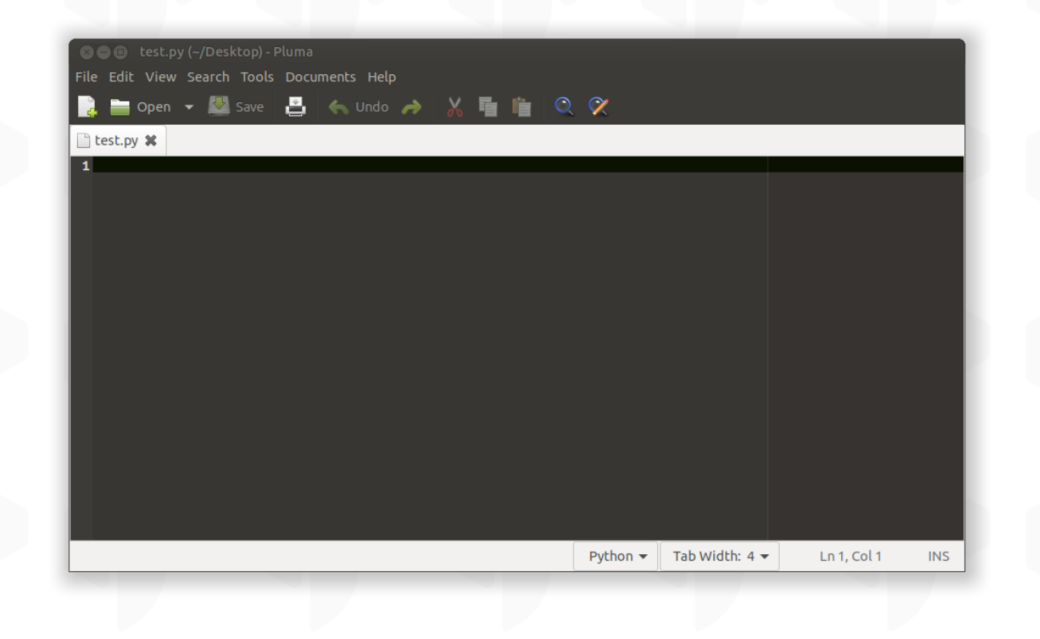
3.单击打开后进行python编程
4.python教程以及更多案例请查看章节:基于python开发使用
通过终端使用python
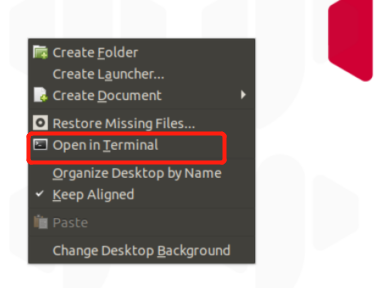
1.直接在桌面右击鼠标,选择 Open in Terminal(快捷键CTRL+ALT+T),打开终端
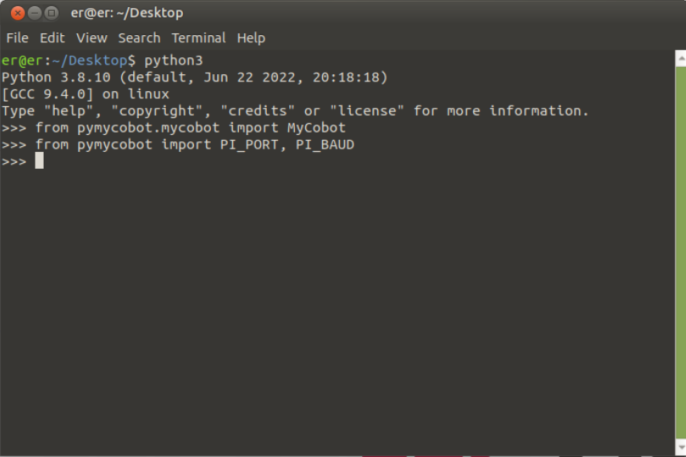
2.在终端中输入'python3 ',开始编程
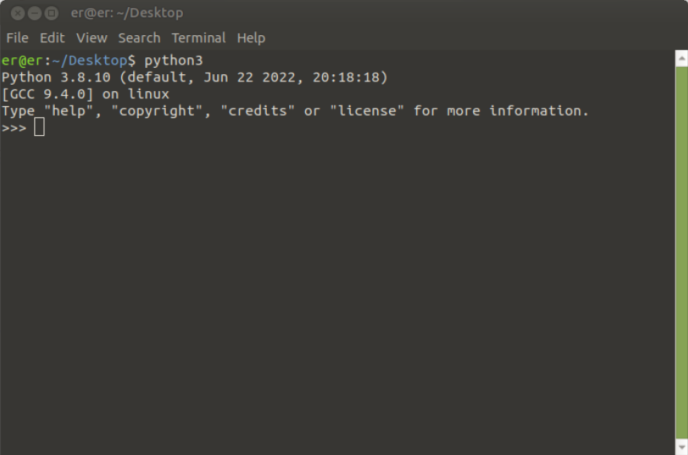
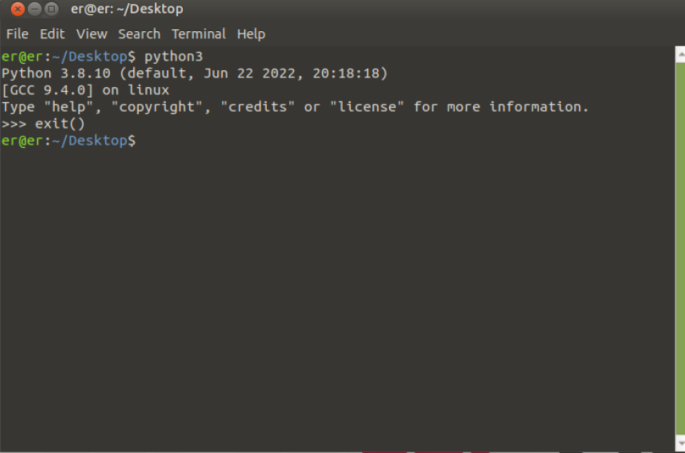
3.使用快捷键(CTRL+Z)或者输入‘exit()’退出编程界面
4.python教程以及更多案例请查看章节:基于python开发使用
通过VSCode使用python
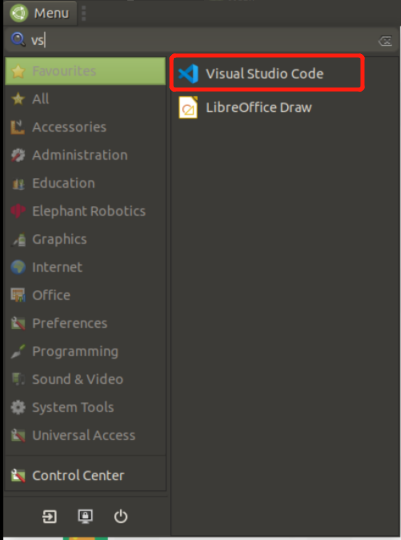
1.在右上角菜单中搜索VS,打开VSCode
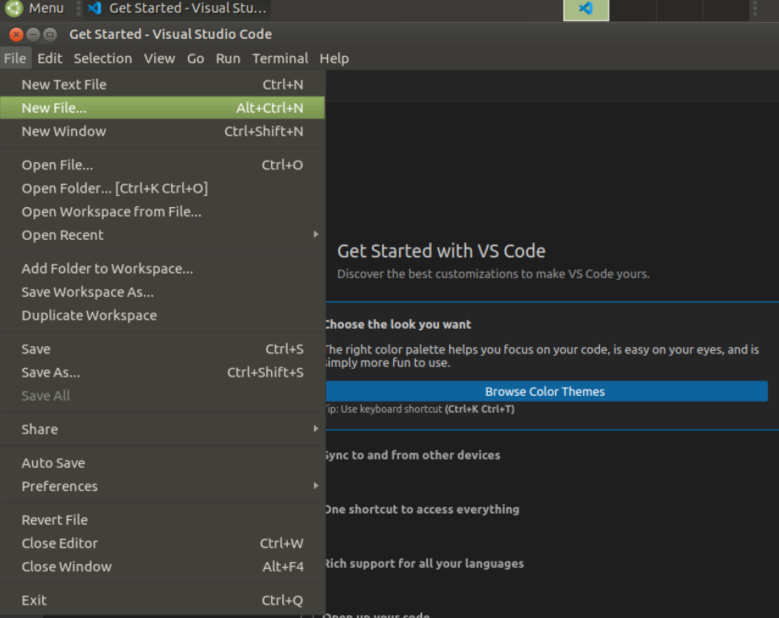
2.进入VSCode后,选择 File -> New File 创建python文件
3.为文件命名

4.选择文件存放位置即可
5.python教程以及更多案例请查看章节:基于python开发使用
myStudio
1.点击桌面myStudio图标打开

打开后如下图所示
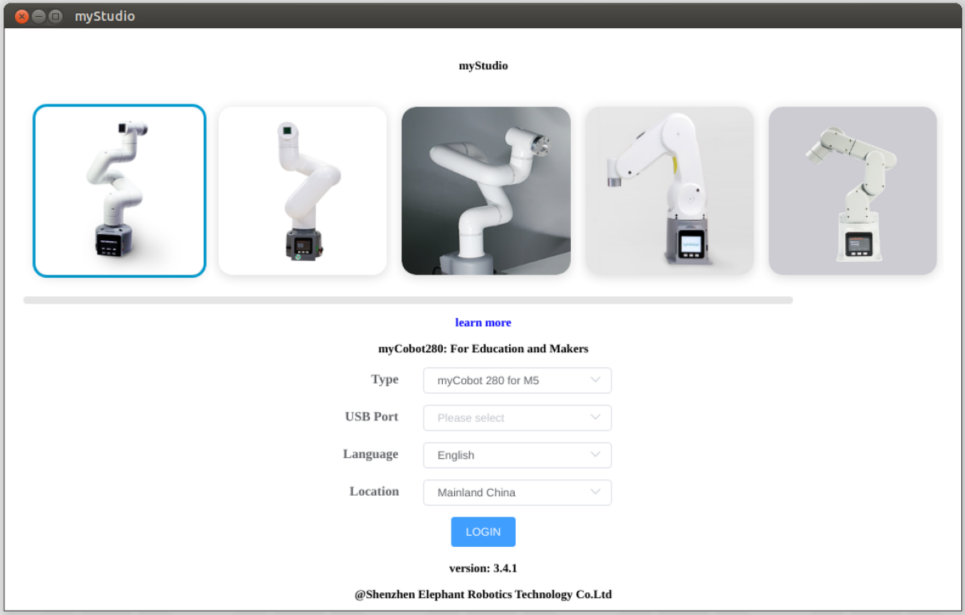
2.myStudio教程请查看章节:5.1 myStudio
myBlockly
1.点击桌面myBlockly图标打开
打开后如下图所示
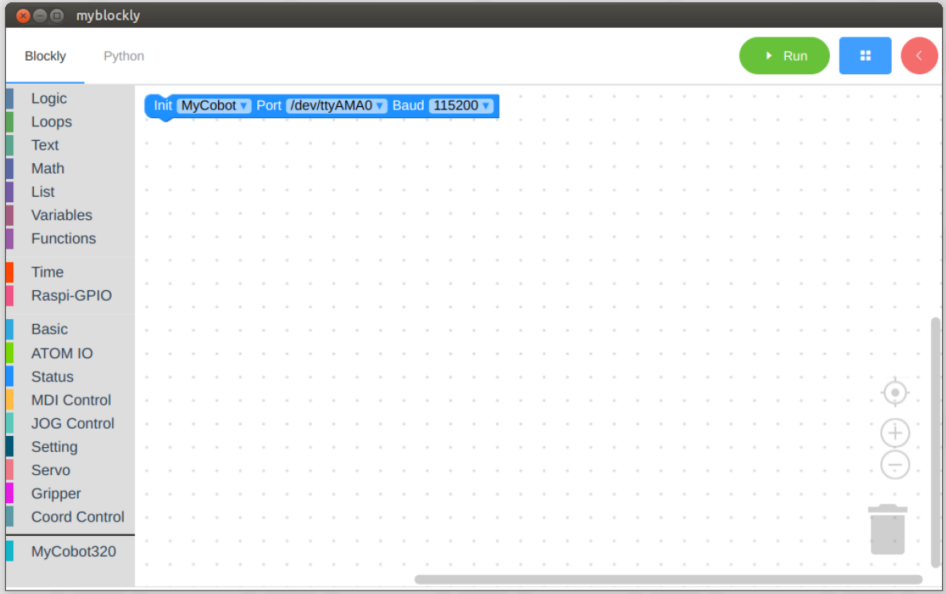
2.myBlockly教程请查看章节:6.1 myBlockly
ROS
ROS1
1.点击桌面ros1图标,打开

打开后如下图所示,ros命令在下方的终端输入即可

2.ros1的教程请参考章节:rviz的简单介绍及使用
ROS2
1.点击桌面ros1图标,打开

打开后如下图所示,ros命令在下方的终端输入即可
2.ros2的教程请参考章节:rviz2的简单介绍及使用